










Høy hastighet uten risiko
Big Data og lignende krever stadig høyere dataoverføringshastigheter. Samtidig må elektroniske komponenter ikke bare bli stadig raskere og smartere, men også stadig mindre. Dette medfører spesielle risikoer ved dataoverføring og dermed også nye utfordringer for tilkoblingsteknologien. Hva må du være oppmerksom på når det gjelder kontaktdon for å unngå signalforstyrrelser?

Den stadig økende digitaliseringen i alle bransjer, som Industrial Internet of Things, Industri 4.0, Smart Grid og Smart Home, krever høyhastighets dataoverføring fra sensoren til skyen. Men ikke bare for sensorer, men også for industrielle styringssystemer og kamerasystemer, datakommunikasjon og serverapplikasjoner gjelder det at signaler må overføres pålitelig med 20 Gbit/s og mer. I tillegg til høy hastighet medfører IIoT, Big Data og lignende en ytterligere trend: Elektroniske komponenter må ikke bare bli stadig raskere og smartere, men også stadig mindre. Denne stadig økende miniatyriseringen gjør det vanskeligere for utviklere å bestå de obligatoriske EMC-testene i henhold til den europeiske direktiven. Dette skyldes at elektroniske komponenter i en modul kan fungere både som støydempere og som støykilder, og den tette plasseringen av følsomme komponenter øker risikoen for gjensidig påvirkning.
Definisjon av kjøretøyets elektriske system: Desentralisert arkitektur med domener og soner

Den klassiske desentraliserte arkitekturen i biler består av opptil 100 styreenheter, hvor hver styreenhet er tildelt en bestemt funksjon: motorstyring, airbag, ABS/ESP, setejustering, klimaanlegg, … Hver styreenhet fungerer selvstendig og kommuniserer via gateways med andre styreenheter.
I løpet av de siste tiårene har den desentraliserte arkitekturen gjennomgått en historisk vekst, og hver nye funksjonalitet ble supplert med en ny styreenhet. I dag har den imidlertid nådd sine grenser: Økende funksjonalitet øker installasjons- og kablingkostnadene i bilen betydelig.
I domenearkitekturen blir styreenhetene samlet i ulike funksjonsområder. Hvert domene er ansvarlig for et bestemt område av kjøretøyet, for eksempel drivverk, infotainment eller sikkerhet. Den overordnede styringen av et domene utføres av en egenstående High Performance Computer (HPC). Denne koordinerer styreenhetene innenfor sitt domene. For funksjonsområdet sikkerhet vil dette for eksempel være styreenheter for førerassistansesystemer, ABS/ESP og styresystemer.
Sammenlignet med den desentraliserte arkitekturen reduseres kabling- og installasjonsarbeidet på grunn av det mindre antallet innebygde styreenheter. Domenearkitekturen kan dermed også bidra effektivt til kostnads- og vektreduksjon sammenlignet med den desentrale arkitekturen. I tillegg kan tilleggsfunksjoner integreres i etterkant med liten innsats.
I sonearkitekturen skjer struktureringen ikke basert på domener, men etter lokale soner. For eksempel samles flere funksjoner innenfor en sone i bilen. Dermed kan også funksjoner som drivverk og infotainment samles og behandles i en sonekontroller. Den overordnede styringen av de ulike sonekontrollerne skjer via en sentral HPC. Fordelen er åpenbar: En reduksjon av styreenhetene og kablingen med opptil 50 prosent.
I løpet av de siste tiårene har den desentraliserte arkitekturen gjennomgått en historisk vekst, og hver nye funksjonalitet ble supplert med en ny styreenhet. I dag har den imidlertid nådd sine grenser: Økende funksjonalitet øker installasjons- og kablingkostnadene i bilen betydelig.
I domenearkitekturen blir styreenhetene samlet i ulike funksjonsområder. Hvert domene er ansvarlig for et bestemt område av kjøretøyet, for eksempel drivverk, infotainment eller sikkerhet. Den overordnede styringen av et domene utføres av en egenstående High Performance Computer (HPC). Denne koordinerer styreenhetene innenfor sitt domene. For funksjonsområdet sikkerhet vil dette for eksempel være styreenheter for førerassistansesystemer, ABS/ESP og styresystemer.
Sammenlignet med den desentraliserte arkitekturen reduseres kabling- og installasjonsarbeidet på grunn av det mindre antallet innebygde styreenheter. Domenearkitekturen kan dermed også bidra effektivt til kostnads- og vektreduksjon sammenlignet med den desentrale arkitekturen. I tillegg kan tilleggsfunksjoner integreres i etterkant med liten innsats.
I sonearkitekturen skjer struktureringen ikke basert på domener, men etter lokale soner. For eksempel samles flere funksjoner innenfor en sone i bilen. Dermed kan også funksjoner som drivverk og infotainment samles og behandles i en sonekontroller. Den overordnede styringen av de ulike sonekontrollerne skjer via en sentral HPC. Fordelen er åpenbar: En reduksjon av styreenhetene og kablingen med opptil 50 prosent.
Krav til HPC og dens kontakter

Kravene som dette stiller til en HPC er store: Ikke minst behandlingen av bildedata innen infotainment eller kamerasystemer for autonom kjøring krever sikker høyhastighets dataoverføring med korte forsinkelser. Samtidig må det under ingen omstendigheter oppstå feil i signaloverføringen – påliteligheten må være sikret til enhver tid.
Høy ytelse, rask og fremfor alt pålitelig dataoverføring – noen ganger under ugunstige miljøforhold – er derfor også krav som stilles til de innebygde kontaktene.
«Lesbarheten» til et signal kan illustreres ved hjelp av det såkalte øyediagrammet. Dette angir om et overført signal i mottakeren entydig kan tilordnes de digitale tilstandene 1 eller 0.
For dette formålet går et signal gjennom en definert overføringsvei, hvor det registreres, overlagres og vises av et oscilloskop. På denne måten kan alle mulige signalforløp vises «over hverandre». I teorien er overgangene mellom de logiske tilstandene uendelig bratte, og signallinjene ligger nøyaktig over hverandre. På grunn av eksterne forstyrrende faktorer og intern påvirkning av signalparene flater signalstigningen ut, og amplituden endres. Det oppstår den form som har gitt diagrammet navnet «øye».
Høy ytelse, rask og fremfor alt pålitelig dataoverføring – noen ganger under ugunstige miljøforhold – er derfor også krav som stilles til de innebygde kontaktene.
«Lesbarheten» til et signal kan illustreres ved hjelp av det såkalte øyediagrammet. Dette angir om et overført signal i mottakeren entydig kan tilordnes de digitale tilstandene 1 eller 0.
For dette formålet går et signal gjennom en definert overføringsvei, hvor det registreres, overlagres og vises av et oscilloskop. På denne måten kan alle mulige signalforløp vises «over hverandre». I teorien er overgangene mellom de logiske tilstandene uendelig bratte, og signallinjene ligger nøyaktig over hverandre. På grunn av eksterne forstyrrende faktorer og intern påvirkning av signalparene flater signalstigningen ut, og amplituden endres. Det oppstår den form som har gitt diagrammet navnet «øye».

I midten av diagrammet ser man den såkalte «Eye Mask». Det er ikke mulig å identifisere signalet entydig i dette området.
De to øyediagrammene viser påvirkningen av ledningslengde og impedans ved hjelp av eksemplet med ept Colibri-kontakter i utførelsene 16 + Gbit/s og 10 Gbit/s. Eksemplet illustrerer hvordan en betydelig økning i signalintegriteten kunne oppnås gjennom videreutviklingen av kontaktdesignet (se fig. XX). Takket være kortere ledningslengde og 100 Ω impedans kan øyet til 16+ Gbit/s-varianten av Colibri dannes tydeligere enn hos forgjengeren til Colibri med 10 Gbit/s – signalparene kan tolkes entydig.
De to øyediagrammene viser påvirkningen av ledningslengde og impedans ved hjelp av eksemplet med ept Colibri-kontakter i utførelsene 16 + Gbit/s og 10 Gbit/s. Eksemplet illustrerer hvordan en betydelig økning i signalintegriteten kunne oppnås gjennom videreutviklingen av kontaktdesignet (se fig. XX). Takket være kortere ledningslengde og 100 Ω impedans kan øyet til 16+ Gbit/s-varianten av Colibri dannes tydeligere enn hos forgjengeren til Colibri med 10 Gbit/s – signalparene kan tolkes entydig.
Siden høyhastighetssignaler er spesielt utsatt for elektromagnetiske forstyrrelser, trenger de spesiell signalbeskyttelse. En kontakt kan i denne sammenheng fungere både som forstyrrelseskilde og som avledningspunkt. Av denne grunn anbefales signalbeskyttelse ved hjelp av skjermplate for å beskytte de følsomme signalene mot ytre påvirkning.
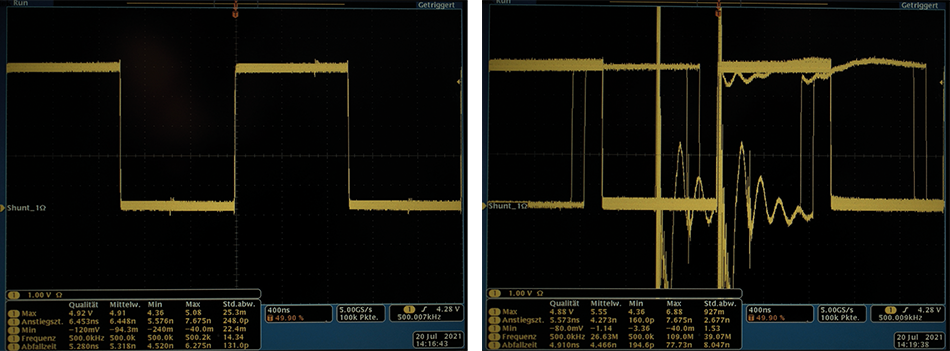
Figur 4 viser at selv en liten elektrisk impuls kan forvrenge brukssignalet. Mottakeren kan ikke lenger tolke de digitale tilstandene til HDMI-signalet entydig etter en kort burst-impuls på 0,5 kV, mens signaloverføringen til den skjermede kontakten fortsatt er stabil selv ved 4,4 kV.
Figur 4 viser at selv en liten elektrisk impuls kan forvrenge brukssignalet. Mottakeren kan ikke lenger tolke de digitale tilstandene til HDMI-signalet entydig etter en kort burst-impuls på 0,5 kV, mens signaloverføringen til den skjermede kontakten fortsatt er stabil selv ved 4,4 kV.

Med koblingsinduktansen LK som EMV-parameter kan kontakten beskrives ved å se på de elektriske forholdene i begge funksjonene – kilde og senke. Her benyttes enheten henry. Dette gjelder både for forstyrrelsesmotstand og forstyrrelsesutsendelse. Hvis den induserte spenningen (Uind), generatorens spenning (UGen) og generatorkonstanten (kGen) er kjent, kan den spesifikke maksimalt tillatte koblingsinduktansen (L) for en applikasjon bestemmes ved hjelp av følgende formel:
LK = Uind / (UGen * kGen)
Koblingsinduktansen hjelper dessuten brukeren med å definere den passende kontakten med hensyn til elektromagnetisk kompatibilitet og unngå kostbare og tidkrevende prøve-og-feil-tester i EMC-laboratoriet. Her er et eksempel: For et HDMI-signal ble det ved en spenning på 4,4 kV beregnet en tilfelletilpasset maksimal koblingsinduktans på 47 picohenry (pH). Ligger verdien over dette, kan signalet følgelig ikke lenger overføres uten forstyrrelser.
LK = Uind / (UGen * kGen)
Koblingsinduktansen hjelper dessuten brukeren med å definere den passende kontakten med hensyn til elektromagnetisk kompatibilitet og unngå kostbare og tidkrevende prøve-og-feil-tester i EMC-laboratoriet. Her er et eksempel: For et HDMI-signal ble det ved en spenning på 4,4 kV beregnet en tilfelletilpasset maksimal koblingsinduktans på 47 picohenry (pH). Ligger verdien over dette, kan signalet følgelig ikke lenger overføres uten forstyrrelser.
Men det er ikke bare elektromagnetiske påvirkninger som utgjør en trussel mot overføringen av høyhastighetssignaler. Spesielt i bilindustrien utsettes kontaktene gjentatte ganger for ekstreme miljøforhold som vibrasjon og støt. For at signaloverføringen skal foregå uten avbrudd også i tøffe omgivelser, må kontakten være spesielt robust. Her spiller først og fremst kontaktdesign, kontaktsystem og tilkoblingsteknikk en avgjørende rolle.
Påvirkningsfaktor: Kontaktsystem

Klassiske todelte kontakter har en knivkontakt og en fjærkontakt. Ved kraftige støt kan imidlertid knivkontakten løsne fra fjærkontakten. For å unngå en slik kontaktavbrudd kan man ved hjelp av en dobbeltsidig fjærkontakt sikre redundans og dermed kontaktsikkerhet, da den andre fjæren sikrer at signaloverføringen til enhver tid skjer via minst ett kontaktpunkt (fig. 5).

Enda mer robuste er derimot kontaktene med det såkalte «kjønnsnøytrale» kontaktsystemet. Det spesielle ved dette er at kontaktgeometrien er identisk for begge deler av kontaktparet, nemlig plugg og stikkontakt. Begge har derfor både en fjær og en kontaktpinne. Dermed får hver pinne kontakt med to fjærer, og pluggen og stikkontakten er flettet sammen slik at de ikke kan løsne fra hverandre. Mens en dobbeltsidig fjærlist alltid sikrer minst ett kontaktpunkt under mekanisk belastning, sikrer de sammenflettede geometriene i kjønnsnøytrale kontaktsystemer at signaloverføringen alltid går via to kontaktpunkter. Denne høye redundansen gir dermed maksimal kontaktsikkerhet (fig. 5).

Som tilkoblingsteknikk for en holdbar forbindelse mellom kretskortet og kontakten anbefales overflatemonteringsteknologi (SMT). Ved hjelp av loddepasta loddes kontaktene fast på bestemte kontaktflater på kretskortet, de såkalte loddepunktene. Først i en såkalt reflow-ovn smeltes loddematerialet og herdes deretter. Med SMT kan man oppnå stabile forbindelser mellom kontakten og kretskortet. For dette må imidlertid noen kriterier være oppfylt: For det første må det riktige forholdet mellom loddestift, loddepute og loddepasta overholdes for å oppnå et loddepunkt som er i samsvar med standarden IPC-A-610. Bare på denne måten oppnås en forbindelse av høy kvalitet som muliggjør en tilkobling i henhold til IPC-klasse 3, og som dermed er egnet for bruk i høyytelseselektronikk. I denne klassen må feil i signaloverføringen utelukkes til enhver tid. En optimal loddeforbindelse kjennes igjen på den jevne meniskdannelsen. Kontakten må være omgitt av loddemenisk hele veien rundt for å oppnå best mulig feste på kretskortet. (Fig. 9).
At kontaktføttene ligger i samme plan er en forutsetning for en utmerket forbindelse, og dette kontrolleres gjennom en 100 % automatisert inspeksjon underveis i prosessen.
Konklusjon
Aktuelle utviklingstrekk i bilindustrien stiller stadig nye krav til de innebygde kontaktene. Ved første øyekast ser det ut til at de innebygde kontaktenes rolle blir mindre viktig på grunn av det reduserte antallet styreenheter. Ved nærmere ettersyn viser det seg imidlertid at deres rolle blir stadig viktigere nettopp på grunn av denne overgangen til sentral databehandling ved hjelp av HPC: Pålitelighet i signaloverføringen har aldri vært så viktig som i dag.